Τα ανθρωποειδή ρομπότ κάνουν ένα ακόμη σημαντικό βήμα προς την προσαρμογή τους στον πραγματικό κόσμο. Ερευνητές από την εταιρεία Amazon Frontier AI & Robotics (FAR) και το Πανεπιστήμιο της Καλιφόρνιας στο Μπέρκλεϊ (UC Berkeley) ανέπτυξαν ένα νέο ερευνητικό πλαίσιο που επιτρέπει στα ρομπότ να κινούνται με μεγαλύτερη ευκινησία και προσαρμοστικότητα, μιμούμενα την ανθρώπινη κίνηση.
Το πλαίσιο αυτό ονομάζεται «Perceptive Humanoid Parkour» (PHP) και αξιοποιεί τεχνικές τεχνητής νοημοσύνης για να εκπαιδεύσει τα ρομπότ να εκτελούν δύσκολες κινήσεις, όπως τρέξιμο, άλματα και αναρρίχηση πάνω από εμπόδια.
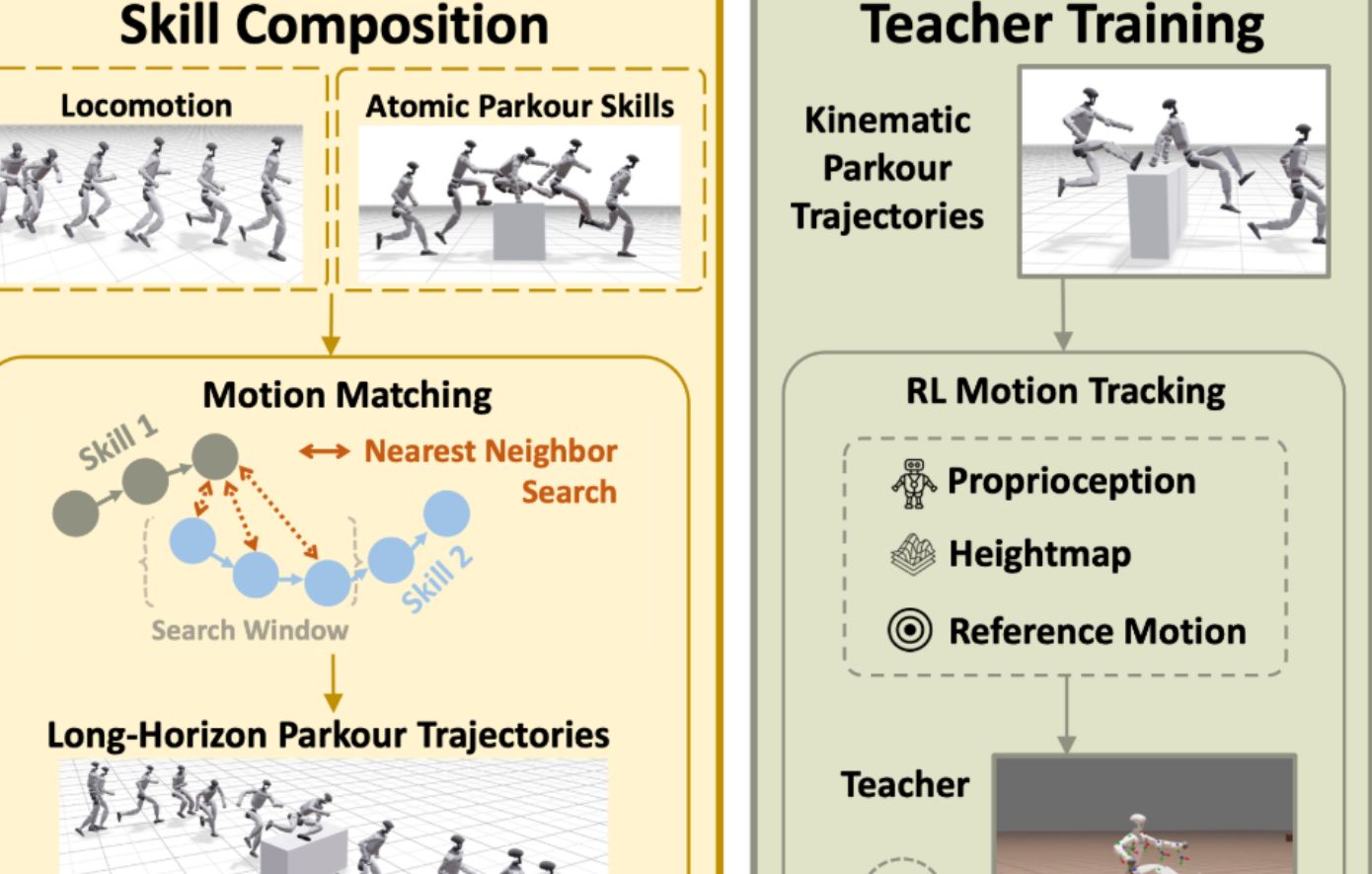
Η ιδέα πίσω από το σύστημα βασίζεται στο parkour, ένα άθλημα που απαιτεί ταχύτητα, ισορροπία και δημιουργική χρήση του περιβάλλοντος. Οι ερευνητές χρησιμοποίησαν βίντεο ανθρώπων που εκτελούν κινήσεις parkour και κατέγραψαν τις δυναμικές κινήσεις τους. Στη συνέχεια, αυτές οι κινήσεις χωρίστηκαν σε μικρότερα επιμέρους τμήματα ώστε να μπορούν να συνδυαστούν μεταξύ τους και να δημιουργήσουν πιο σύνθετες ακολουθίες κινήσεων για τα ρομπότ.

Με αυτόν τον τρόπο, τα ανθρωποειδή συστήματα μπορούν να συνθέτουν διαφορετικές δεξιότητες και να εκτελούν ομαλές κινήσεις σε πολύπλοκα περιβάλλοντα. Σύμφωνα με τους ερευνητές, η πρόκληση δεν είναι μόνο να περπατά ένα ρομπότ σε ανώμαλο έδαφος, αλλά να μπορεί να προσαρμόζεται δυναμικά, να λαμβάνει αποφάσεις και να εκτελεί κινήσεις που θυμίζουν την ανθρώπινη ευελιξία.
Όπως αναφέρει το interestingengineering.com, για την εκπαίδευση των ρομπότ χρησιμοποιήθηκε η τεχνική της ενισχυτικής μάθησης (reinforcement learning). Αρχικά, οι ελεγκτές του ρομπότ εκπαιδεύτηκαν να εκτελούν συγκεκριμένες κινήσεις parkour. Στη συνέχεια, αυτές οι δεξιότητες συνδυάστηκαν σε έναν ενιαίο ελεγκτή, ο οποίος αξιοποιεί οπτικές πληροφορίες από αισθητήρες βάθους για να σχεδιάζει την επόμενη κίνηση. Έτσι, το ρομπότ μπορεί να αποφασίσει αν πρέπει να περάσει κάτω από ένα εμπόδιο, να το σκαρφαλώσει, να πηδήξει ή να κυλήσει πάνω από αυτό.
Για την αξιολόγηση της νέας μεθόδου, οι επιστήμονες χρησιμοποίησαν το ανθρωποειδές ρομπότ Unitree G1. Τα πειράματα έδειξαν ότι το ρομπότ μπορεί να εκτελεί εντυπωσιακές κινήσεις, όπως να σκαρφαλώνει εμπόδια ύψους έως 1,25 μέτρων, δηλαδή σχεδόν όσο και το ίδιο του το ύψος. Επιπλέον, ήταν σε θέση να διασχίζει διαδοχικά εμπόδια και να προσαρμόζεται σε αλλαγές του περιβάλλοντος σε πραγματικό χρόνο.
Οι ερευνητές θεωρούν ότι το πλαίσιο PHP ανοίγει τον δρόμο για πιο αυτόνομα και ευέλικτα ρομπότ που θα μπορούν να λειτουργούν σε πολύπλοκα περιβάλλοντα, όπως πόλεις, εργοτάξια ή περιοχές διάσωσης. Μελλοντικά, τέτοιες τεχνολογίες θα μπορούσαν να βοηθήσουν σε αποστολές έρευνας και διάσωσης ή σε επικίνδυνες εργασίες όπου η ανθρώπινη παρουσία είναι δύσκολη ή επικίνδυνη.
*Φωτογραφίες @Github